




L293D là gì
L293D về cơ bản là một IC trình điều khiển hay bộ điều khiển động cơ. Nó có hai mạch cầu H tích hợp có thể điều khiển đồng thời hai động cơ DC theo cả chiều kim đồng hồ và ngược chiều kim đồng hồ. Nó hoạt động như một bộ khuếch đại dòng cao vì nó lấy tín hiệu dòng điện thấp ở đầu vào và cung cấp tín hiệu dòng điện cao hơn ở đầu ra để điều khiển các tải khác nhau, ví dụ động cơ bước và động cơ DC. Các tính năng của nó bao gồm phạm vi điện áp nguồn đầu vào lớn, tín hiệu đầu vào chống nhiễu cao dòng điện đầu ra lớn,... Các ứng dụng thực tế phổ biến của nó bao gồm trình điều khiển động cơ bước, trình điều khiển relay, trình điều khiển động cơ DC,...
>>>Tham khảo các sản phẩm tại Điện Tử Tương Lai
https://dientutuonglai.com/san-pham/?keyword=L293D
Thông số kỹ thuật L293D
Có thể được sử dụng để chạy hai động cơ DC với cùng một IC.
Có thể kiểm soát tốc độ và hướng
Điện áp động cơ Vcc2 (Vs): 4,5V đến 36V
Dòng động cơ cao nhất tối đa: 1.2A
Dòng động cơ liên tục tối đa: 600mA
Điện áp cung cấp cho Vcc1 (vss): 4,5V đến 7V
Thời gian chuyển tiếp: 300ns (ở 5V và 24V)
Tự động tắt nhiệt
Có các gói DIP, TSSOP, SOIC 16 chân
Lưu ý: Chi tiết kỹ thuật đầy đủ có thể được tìm thấy tại datasheet L293D được cung cấp ở cuối bài này.
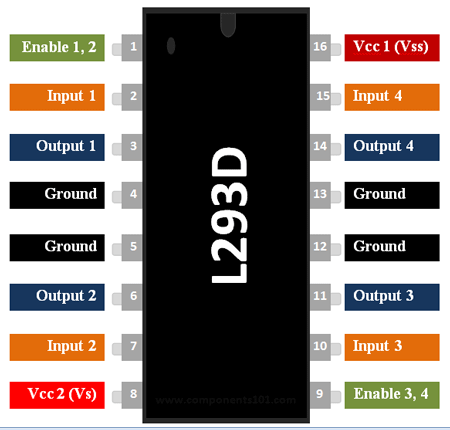
Sơ đồ chân L293D
|
Số chân |
Tên chân |
Mô tả |
|
1 |
Enable 1,2 |
Chân này bật chân đầu vào Input 1 (2) và Input 2 (7) |
|
2 |
Input 1 |
Trực tiếp điều khiển chân Output 1. Điều khiển bằng mạch kỹ thuật số |
|
3 |
Output 1 |
Được kết nối với một đầu của động cơ 1 |
|
4 |
Ground |
Chân ground được nối với mass của mạch (0V) |
|
5 |
Ground |
Chân ground được nối với mass của mạch (0V) |
|
6 |
Output 2 |
Được kết nối với một đầu khác của động cơ 1 |
|
7 |
Input 2 |
Điều khiển trực tiếp chân Output 2. Điều khiển bằng mạch kỹ thuật số |
|
8 |
Vcc2 (Vs) |
Kết nối với chân điện áp để chạy động cơ (4,5V đến 36V) |
|
9 |
Enable 3,4 |
Chân này bật chân đầu vào Input 3 (10) và Input 4 (15) |
|
10 |
Input 3 |
Điều khiển trực tiếp chân Output 3. Điều khiển bằng mạch kỹ thuật số |
|
11 |
Output 3 |
Được kết nối với một đầu của động cơ 2 |
|
12 |
Ground |
Chân ground được nối với mass của mạch (0V) |
|
13 |
Ground |
Chân ground được nối với mass của mạch (0V)  |
|
14 |
Output 4 |
Được kết nối với một đầu khác của động cơ 2 |
|
15 |
Input 4 |
Trực tiếp điều khiển chân Output 4. Điều khiển bằng mạch kỹ thuật số |
|
16 |
Vcc2 (Vss) |
Kết nối với + 5V để bật chức năng IC |
IC định thời kép tương đương L293D
LB1909MC, SN754410, ULN2003
Sử dụng IC L293D ở đâu
L293D là IC điều khiển động cơ 16 chân thông dụng. Như tên cho thấy nó chủ yếu được sử dụng để điều khiển động cơ. Một IC L293D duy nhất có khả năng chạy hai động cơ DC cùng một lúc, cũng có thể điều khiển hướng của hai động cơ này một cách độc lập. Vì vậy, nếu bạn có động cơ có điện áp hoạt động nhỏ hơn 36V và dòng điện hoạt động nhỏ hơn 600mA, được điều khiển bởi các mạch kỹ thuật số như Op-Amp, bộ định thời 555, cổng kỹ thuật số hoặc thậm chí con lăn Micron như Arduino, PIC, ARM,... IC này sẽ là sự lựa chọn phù hợp cho bạn.
Cách sử dụng IC điều khiển động cơ L293D
Sử dụng IC điều khiển động cơ L293D này rất đơn giản. IC hoạt động dựa trên nguyên lý của Half H-Bridge, chúng ta đừng đi quá sâu vào H-Bridge nghĩa là gì, chỉ cần biết rằng H Bridge là một thiết lập được sử dụng để chạy động cơ cả theo hướng chiều kim đồng hồ và ngược chiều kim đồng hồ. Như đã nói trước đó, IC này có khả năng chạy hai động cơ theo bất kỳ hướng nào cùng một lúc, mạch để làm được điều này như bên dưới.
Tất cả các chân ground phải được nối mass. Có hai chân nguồn cho IC này, một chân là Vss (Vcc1) cung cấp điện áp cho IC hoạt động, chân này phải được kết nối với + 5V. Còn lại là Vs (Vcc2) cung cấp điện áp cho động cơ chạy, dựa trên thông số kỹ thuật của động cơ bạn có thể kết nối chân này với bất kỳ đâu trong khoảng từ 4,5V đến 36V, trong trường hợp này là kết nối với + 12V.
Các chân Enable (Enable 1,2 và Enable 3,4) được sử dụng để bật các chân đầu vào cho động cơ 1 và động cơ 2 tương ứng. Vì trong hầu hết các trường hợp, chúng ta sẽ sử dụng cả hai động cơ, cả hai chân đều được giữ ở mức cao theo mặc định bằng cách kết nối với nguồn + 5V. Các chân đầu vào Input 1,2 được sử dụng để điều khiển động cơ 1 và chân đầu vào Input 3,4 được sử dụng để điều khiển động cơ 2. Các chân đầu vào được kết nối với bất kỳ mạch kỹ thuật số hoặc vi điều khiển nào để điều khiển tốc độ và hướng của động cơ. Bạn có thể chuyển đổi các chân đầu vào dựa trên bảng sau để điều khiển động cơ của mình.
|
Input 1 = CAO (5V) |
Output 1 = CAO |
Động cơ 1 quay theo chiều kim đồng hồ |
|
Input 2 = THẤP (0V) |
Output 2 = THẤP |
|
|
Input 3 = CAO (5V) |
Output 1 = CAO |
Động cơ 2 quay theo chiều kim đồng hồ |
|
Input 4 = THẤP (0V) |
Output 2 = THẤP |
|
Input 1 = THẤP (0V) |
Output 1 = THẤP |
Động cơ 1 quay theo chiều ngược kim đồng hồ |
|
Input 2 = CAO (5V) |
Output 2 = CAO |
|
|
Input 3 = THẤP (0V) |
Output 1 = THẤP |
Động cơ 2 quay theo chiều ngược kim đồng hồ |
|
Input 4 = CAO (5V) |
Output 2 = CAO |
|
Input 1 = CAO (5V) |
Output 1 = CAO |
Động cơ 1 đứng yên |
|
Input 2 = CAO (5V) |
Output 2 = CAO |
|
|
Input 3 = CAO (5V) |
Output 1 = THẤP |
Động cơ 2 đứng yên |
|
Input 4 = CAO (5V) |
Output 2 = CAO |
Các ứng dụng của L293D
Được sử dụng để điều khiển động cơ dòng cao bằng cách sử dụng mạch kỹ thuật số
Có thể được sử dụng để điều khiển động cơ bước
Có thể điều khiển LED dòng cao
Module trình điều khiển relay

Hotline: 0979 466 469




