




bài viết hướng dẫn cách Điều khiển động cơ DC sử dụng tín hiệu PWM - Arduino
Điều khiển động cơ DC sử dụng tín hiệu PWM - Arduino
1. Giới thiệu
Tốc độ động cơ DC tỷ lệ thuận với điện áp cung cấp, vì vậy nếu giảm điện áp từ 9(v) xuống 4,5(v) thì tốc độ của chúng sẽ giảm bằng một nửa so với ban đầu. Để thay đổi tốc độ của động cơ một chiều, Ta không thể liên tục thay đổi điện áp nguồn. Bộ điều khiển tốc độ PWM cho động cơ DC hoạt động bằng cách thay đổi điện áp trung bình được cung cấp cho động cơ.
Tín hiệu PWM về bản chất là một sóng vuông tần số cao (thường lớn hơn 1KHz). Chu kỳ nhiệm vụ của sóng vuông này thay đổi để thay đổi công suất cung cấp cho tải. Ở những sóng này tần số giống nhau nhưng thời gian BẬT và TẮT khác nhau.
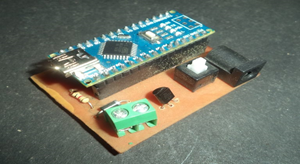
2. Yêu cầu phần cứng
Các thành phần:
+1 Adruino Nano
+1 Động cơ DC năng lượng thấp
+1 Bóng bán dẫn 2N222
+1 Bộ chuyển đối điện 12v
+1 Sức cản 1000
+1 Diode 1N4004
+1 Cáp USB adruino Nano
3. Bóng bán dẫn (2N2222)
Bộ vi điều khiển và Arduino có thể xử lý tín hiệu và tiêu thụ dòng điện gần 20 đến 40mA nhưng động cơ cần dòng điện và điện áp cao, vì vậy chúng tôi đang sử dụng bóng bán dẫn để điều khiển động cơ.
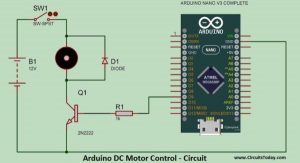
Bóng bán dẫn được mắc nối tiếp với động cơ và đế của bóng bán dẫn được kết nối với chân PWM của Arduino thông qua một điện trở. Tín hiệu PWM đến từ Arduino và bóng bán dẫn hoạt động như một công tắc và nó làm ngắn mạch. Bộ phát (E) và Bộ thu (C) khi tín hiệu PWM ở trạng thái cao và thường mở khi tín hiệu PWM ở trạng thái thấp. Quá trình này hoạt động liên tục và các động cơ chạy ở tốc độ mong muốn.

4. Điều khiển tốc độ động cơ DC bằng Arduino & PWM
Điều khiển tốc độ của động cơ DC với Giao diện PC là một dự án DIY dễ dàng. Trong dự án này, tốc độ của động cơ DC được điều khiển bằng cách gửi lệnh qua PC. Arduino được kết nối trực tiếp với PC thông qua cáp USB và lệnh được đưa cho Arduino trên màn hình nối tiếp của Arduino IDE. Động cơ được kết nối với một bóng bán dẫn và chân đế của bóng bán dẫn được kết nối với chân PWM của Arduino và tốc độ động cơ thay đổi tùy theo tín hiệu PWM đến từ Arduino.
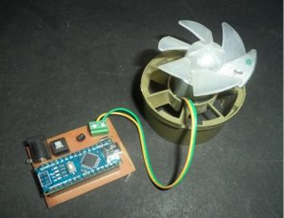
5. Điều khiển động cơ DC Arduino - Hoạt động
Arduino được kết nối với PC thông qua cáp USB. Chúng ta có thể gửi lệnh tới PC trên màn hình nối tiếp. Chúng ta có thể thay đổi tốc độ của động cơ từ 0 đến 9. Khi 0 được gửi qua Màn hình nối tiếp, động cơ sẽ chạy ở tốc độ tối thiểu (đó là 0). Khi thay đổi tốc độ từ 1 đến 9, tốc độ tăng lên, với giá trị 9 được đặt là tốc độ lớn nhất của động cơ. Công nghệ điều khiển động cơ DC PWM được sử dụng để điều khiển tốc độ. Trong PWM, Arduino gửi một sóng xung tương tự như chế độ ổn định của IC hẹn giờ 555.
6. Điều khiển tốc độ PWM (Điều chế độ rộng xung)
Vi điều khiển và Arduino là thiết bị kỹ thuật số; chúng không thể đưa ra đầu ra tương tự. Bộ vi điều khiển cho Zero và ONE làm đầu ra, trong đó ZERO là THẤP hợp lý và ONE là CAO hợp lý. Trong trường hợp của chúng tôi, chúng tôi đang sử dụng phiên bản 5 volt của Arduino. Vì vậy, nó hợp lý ZERO là điện áp 0, và CAO hợp lý là 5 điện áp. Đầu ra kỹ thuật số tốt cho các thiết bị kỹ thuật số nhưng đôi khi chúng ta cần đầu ra tương tự. Trong trường hợp này, PWM rất hữu ích. Trong PWM, tín hiệu đầu ra chuyển đổi giữa 0 và 1, ở tần số cao và cố định, như thể hiện trong hình bên dưới.
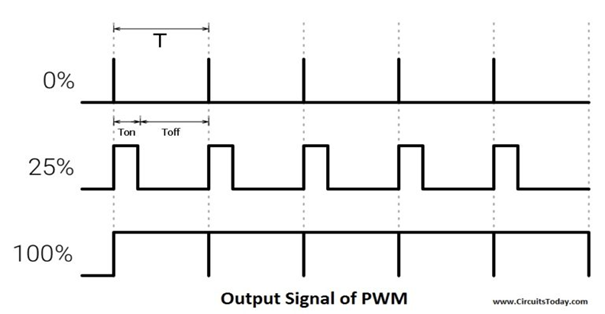
Như trong hình trên, thời gian bật là “Ton” và thời gian tắt là “Toff”. T là tổng của “Ton” và “Toff” được gọi là Khoảng thời gian. Trong khái niệm của PWM, “T” không thay đổi và “Ton” và “Toff” có thể khác nhau, theo cách này khi “Ton” tăng “Toff” sẽ giảm và “Toff” tăng khi “Ton” giảm tương ứng. Chu kỳ nhiệm vụ là một phần của một Khoảng thời gian. Chu kỳ nhiệm vụ thường được biểu thị dưới dạng phần trăm hoặc tỷ lệ. Khoảng thời gian là thời gian cần thiết để một tín hiệu hoàn thành một chu kỳ bật và tắt.
7. Quá trình
1. Kết nối Arduino qua USB và tải mã lên
2. Mở màn hình nối tiếp và đặt tốc độ truyền ở 9600
3. Bây giờ gõ bất kỳ số nào từ 0 đến 9.
Sau khi nhập bất kỳ giá trị nào từ 0 đến 9, tốc độ của động cơ sẽ thay đổi, nhưng chúng tôi không thể thấy tốc độ thay đổi trong video một cách chính xác, nhưng bạn có thể xem trực tiếp.

Hotline: 0979 466 469




