




Động cơ bước? Ứng dụng của động cơ bước trong thực tế? Cách điều khiển động cơ bước dùng 8051?
ĐIỀU KHIỂN ĐỘNG CƠ BƯỚC DÙNG VI ĐIỀU KHIỂN 8051
Bài viết này nói về sự kết nối động cơ bước với vi điều khiển 8051. Nhiều người đang tự hỏi là làm cách nào để biết được cách giao tiếp của động cơ bước tới vi điều khiển 8051? Trong thời điểm hiện tại, động cơ bước đang được sử dụng rộng rãi ở bất cứ lĩnh vực nào cần độ chính xác cao (độ xoay của động cơ hoặc định vị vị trí đối tượng..) ứng dụng trong điện tử công nghiệp, y tế, tiêu dùng.. v.v.
Động cơ bước

Động cơ bước là một động cơ đồng bộ dùng để chuyển đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay. Nó quay theo từng bước dựa trên các xung đầu vào. Một động cơ bước gồm có một cuộn dây stato (pha) và một rôto có răng. Động cơ bước được điều khiển bởi bộ điều khiển từ bên ngoài tác động vào. Khi có dòng điện hay điện áp đặt vào cuộn dây phần ứng của động cơ bước làm cho roto của động cơ quay một góc nhất định gọi là bước của động cơ. Góc bước là góc quay của trục động cơ tương ứng với một xung điều khiển. Kích thước bước là sự dịch chuyển góc quay của rôto trong một bước và được xác định bởi số lượng pha và số răng trên rôto.
VD: Nếu một động cơ bước có 4 pha và 50 răng thì phải mất 50 × 4 = 200 bước để thực hiện một vòng quay hoàn chỉnh. Vậy góc bước sẽ là 360/200 = 1.8°.
Động cơ bước chúng tôi đang sử dụng có 4 cực và cơ cấu giảm tốc để tăng momen xoắn. Góc bước của động cơ là 5,64 °. Nhưng khi xét giảm tốc, góc bước của trục đầu ra là 5,64°/64°.
Sơ đồ bên trong của động cơ bước:
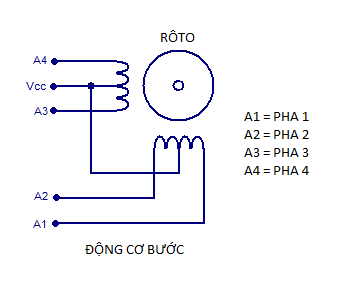
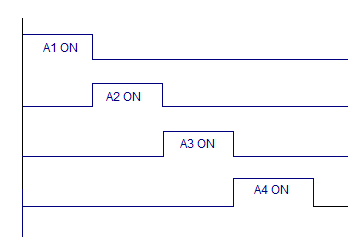
Động cơ bước quay khi có sự chuyển đổi ở pha hoạt động tại từng thời điểm nhất định. Được mô tả như sơ đồ bên dưới:
Sơ đồ mạch điện
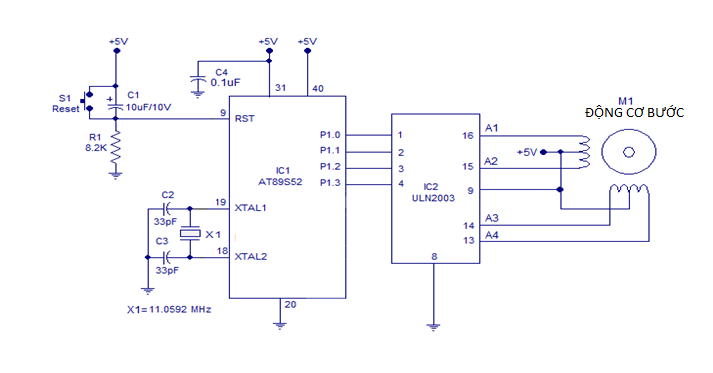
Sơ đồ mạch cho giao tiếp động cơ bước tới 8051 được hiển thị ở trên. Các chân P1.0, P1.1, P1.2 và P1.3 được sử dụng để điều khiển các pha A1, A2, A3 và A4 của động cơ bước tương ứng. IC ULN2003 được sử dụng để điều khiển các pha riêng lẻ của động cơ bước. ULN2003 là Transistor darlington (2 transistor lưỡng cực cùng kiểu mắc với nhau) được sử dụng để chia bớt dòng tải cho như rơle và động cơ. ULN2003 có 8 kênh riêng lẻ, mỗi kênh có dòng tối đa là 1A. Các kênh có thể được mắc song song để tăng công suất của mạch. Mỗi kênh đều gắn 1 diode tự do. ULN2003 sẽ làm việc ở chế độ ngủ cho đến khi kênh được kích hoạt bằng cách đưa mức logic THẤP vào đầu vào tương ứng.
VD: Nếu cấp vào chân 1 của ULN2003 mức thấp thì pha A1 của động cơ bước BẬT.
Lưu ý:
Chiều quay động cơ bước không phụ thuộc vào chiều dòng điện mà phụ thuộc vào thứ tự cấp xung cho các cuộn dây.
Chương trình
A1 EQU P1.0
A2 EQU P1.1
A3 EQU P1.2
A4 EQU P1.3
ORG 00H
MOV TMOD,#00000001B
MAIN:
CLR A1

ACALL DELAY
SETB A1
CLR A2
ACALL DELAY
SETB A2
CLR A3
ACALL DELAY
SETB A3
CLR A4
ACALL DELAY
SETB A4
SJMP MAIN
DELAY:MOV R6,#1D
BACK: MOV TH0,#00000000B
MOV TL0,#00000000B
SETB TR0
HERE2: JNB TF0,HERE2
CLR TR0
CLR TF0
DJNZ R6,BACK
RET
END
Chương trình đầu tiên sẽ xóa P1.0 để kích cho pha 1 (A1) của động cơ bước. Việc này được duy trì trong 65 ms và sau đó P1.0 được set để hủy kích hoạt pha 1 của động cơ. Sau đó, quá trình tương tự được lặp lại cho các chân từ P1.1 đến P1.3 và toàn bộ chu trình được lặp đi lặp lại để làm cho động cơ quay theo chiều kim đồng hồ.
Timer 0 của vi điều khiển được cấu hình trong Mode1 để tạo độ trễ cho dao động và 65ms là độ rộng của mỗi xung điều khiển.

Hotline: 0979 466 469




")