




ROBOT DÒ LINE SỬ DỤNG ARDUINO
Toàn bộ phần cứng của robot dò line đơn giản này được chia thành ba phần: Các cảm biến, board Arduino và mạch điều khiển động cơ. Hãy tìm hiểu phần cảm biến đầu tiên.
Phần 1: Cảm biến
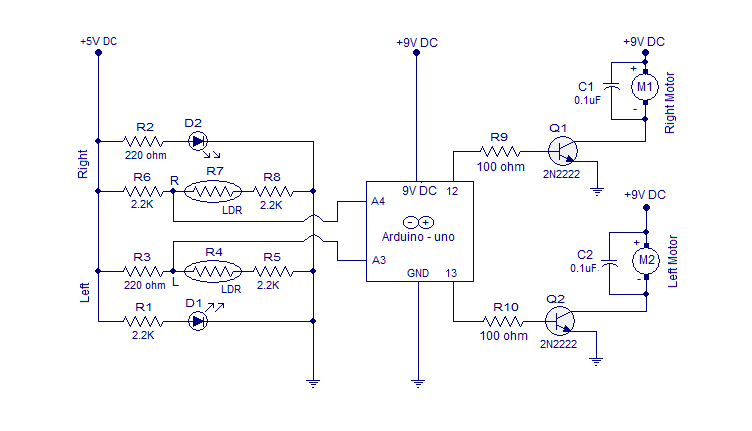
Cảm biến bao gồm hai cặp LED / LDR với các điện trở giới hạn dòng thích hợp. Điện trở của LDR tỷ lệ nghịch với cường độ ánh sáng chiếu vào nó. Sơ đồ mạch của cảm biến được hiển thị trong hình bên dưới.
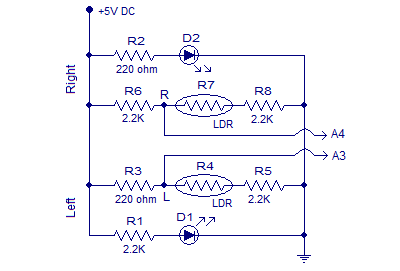
Các điện trở R1 và R2 là các điện trở hạn dòng cho LED. Các điện trở R6, R8, R3 và R5 là các điện trở phân chia điện áp trong mạng. Khi cảm biến được căn chỉnh chính xác, hai cặp LED/LDR sẽ phủ lên bề mặt màu trắng, ở giữa hai cảm biến là line màu đen. Led siêu sáng chiếu ánh sáng xuống line và phản xạ ngược lại quang trở tương ứng. Nếu là bề mặt màu trắng thì ánh sáng phản xạ lại quang trở với cường độ mạnh, điện trở giảm. Vì vậy, điện áp rơi trên LDR sẽ thấp. Khi robot bị lệch về một phía, cảm biến ở phía đối diện sẽ rơi xuống vạch đen và cường độ ánh sáng phản xạ trở lại LDR tương ứng sẽ thấp. Kết quả là điện trở của LDR tăng lên và điện áp rơi trên nó sẽ cao. Các điện áp gim trên LDR sẽ được đưa vào Arduino thông qua 2 chân A3 và A4.
Cảm biến bao gồm hai cặp LED / LDR với các điện trở giới hạn dòng thích hợp. Điện trở của LDR tỷ lệ nghịch với cường độ ánh sáng chiếu vào nó. Sơ đồ mạch của cảm biến được hiển thị trong hình bên dưới.
Phần 2: Board Arduino Uno
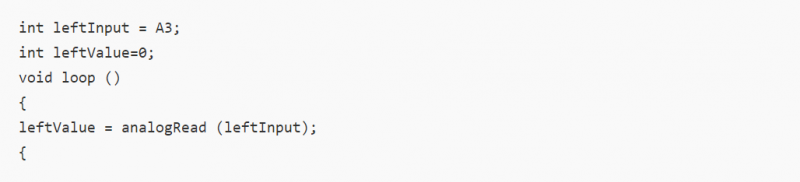
Board arduino phải được lập trình để giữ cho robot đi đúng đường. Để làm được như vậy, ta phải đọc đầu vào của các cảm biến sau đó chỉnh motor quay theo hướng thích hợp. Đầu ra của cảm biến phải được kết nối với chân analog A3 và A4 của Arduino. Phạm vi điện áp cho phép của ngõ vào là 0-5V. Phạm vi này có thể được chuyển đổi thành giá trị kỹ thuật số trong khoảng từ 0 đến 1023 bằng cách sử dụng lệnh analogRead () Â. Ví dụ: nếu 3V được áp dụng cho A3, thì đoạn mã sau sẽ trả về 3 /(5/1023) tương đương với giá trị 613.
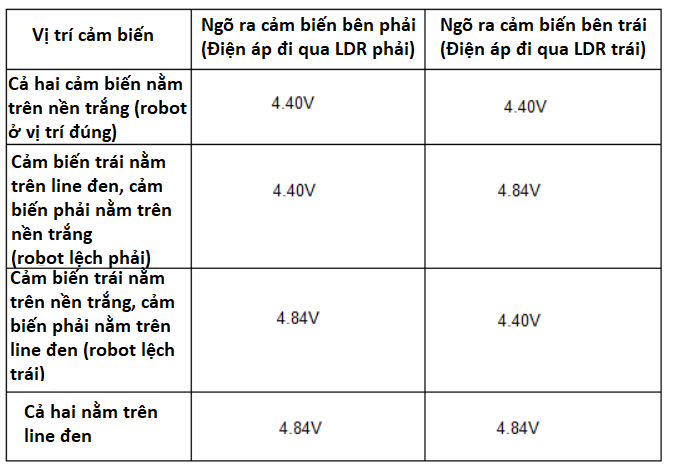
Từ board trên, bạn có thể thấy rằng điện áp trên một LDR cụ thể sẽ là 4,4V khi nó có màu trắng và 4,84V khi có màu đen. Tương đương kỹ thuật số của 4.4V sẽ là 900 và 4.84V sẽ là 990 theo sơ đồ trên. Lấy trung bình của hai giá trị này là 945 và được đặt làm điểm tham chiếu cho chương trình để kiểm tra hướng của mô-đun cảm biến.
Chương trình xác định vị trí của mô-đun cảm biến bằng cách so sánh giá trị đọc cảm biến với điểm tham chiếu là 945. Nếu giá trị đọc của một cảm biến bất kì lớn hơn 945, chương trình có thể hiểu rằng cảm biến đang ở trên màu đen. Nếu giá trị đọc của một cảm biến bất kì nhỏ hơn 945 thì có thể giả định rằng cảm biến đó đang ở trên màu trắng. Nếu cả hai giá trị đọc của cảm biến đều nhỏ hơn 945 thì có nghĩa là cả hai cảm biến đều có màu trắng. Nếu cả hai lần đọc cảm biến đều ở lớn hơn 945, có thể giả định rằng cả hai cảm biến đều ở trên màu đen (điều tương tự xảy ra nếu chúng ta nhấc robot ra khỏi đường đua). Dựa trên bốn điều kiện trên, chương trình chuyển đổi một cách thích hợp các động cơ bên trái và bên phải để giữ cho robot đi theo đường màu đen.
Phần 3: Điều khiển Motor
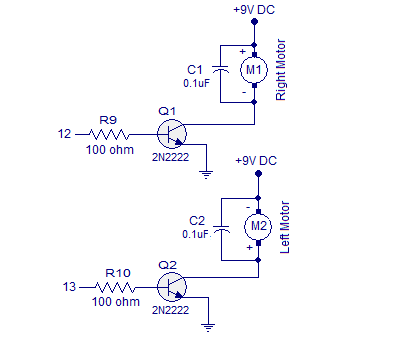
Mạch điều khiển động cơ dựa trên hai transistor NPN Q1 và Q2. Mỗi transistor được nối dây với motor đóng vai trò như công tắc để giới hạn dòng qua motor. Các động cơ được kết nối với cực E của các transistor tương ứng. Tụ điện 0,1uF được kết nối với mỗi động cơ để chống điện áp vọt quá ngưỡng cho phép và làm hư motor. Sơ đồ mạch của trình điều khiển động cơ được hiển thị trong hình dưới đây.

Sơ đồ mạch
Chương trình
https://drive.google.com/file/d/1mnH_6-mV4Vrt_29zPytZ9wXWL2q_eUcN/view?usp=sharing
Thiết lập mạch
- Trước hết, hãy nhớ rằng mỗi đèn LED và LDR có những đặc điểm riêng.
- Đo điện áp trên mỗi LDR trong cả hai trường hợp (trên bề mặt trắng và đen).
- Rất nhiều thông số như các đặc tính LDR / LED riêng lẻ, ánh sáng xung quanh, độ hở giữa cảm biến và bề mặt, vv có thể ảnh hưởng đến kết quả.
- Nhận vào điểm tham chiếu của riêng bạn cho chương trình. Trong trường hợp của tôi, nó là 945 nhưng bạn có thể nhận được một giá trị khác.
- Động cơ được sử dụng ở đây là động cơ cánh cung DC 9V / 30RPM. Bạn có thể chọn một động cơ khác tùy thích.
- Trong khi hàn mô-đun cảm biến, khoảng cách giữa hai cặp đèn LED / LDR phải được chọn theo chiều rộng của đường màu đen. Trong trường hợp của tôi là 2cm.
- Khoảng trống của cảm biến từ mặt đất là khoảng 1cm trong trường hợp của tôi.
- Các đèn LED cảm biến được sử dụng là đèn LED màu xanh lá cây sáng 4mm.

Hotline: 0979 466 469

")