




MÁY ĐO TỐC ĐỘ SỬ DỤNG ARDUINO
Sơ đồ mạch.
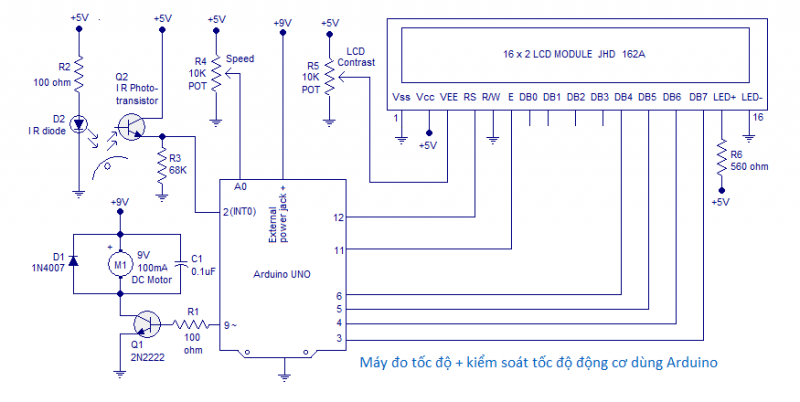
Cảm biến RPM.
Cảm biến bao gồm 1 transistor hồng ngoại và 1 led phát hồng ngoại. Việc sử dụng transistor hồng ngoại sẽ tránh nhiễu ánh sáng khác từ môi trường. Transistor hồng ngoại và led phát hồng ngoại phải được đặt cạnh nhau. Điện trở R2 giúp giới hạn dòng điện qua diode IR.
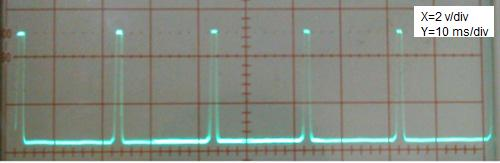
Led phát hồng ngoại sẽ phát ra 1 chùm tia hồng ngoại, chùm tia ánh sáng này đi đến dải phản quang được gắn trên vật cần đo tốc độ và phản xạ lại transistor. Khi đó điện áp sẽ tăng lên đột ngột và kết quả là ta có dạng sóng như hình. RPM có thể xác định được số vòng bằng cách đếm số lần điện áp tăng đột ngột trong một khoảng thời gian nhất định.
Chú ý rằng khoảng cách lớn nhất giữa tấm phản quang và thiết bị đo không vượt quá 350 mm.
Phương pháp đo này sẽ cao cấp hơn phương pháp đo tiếp xúc. Tuy nhiên, không phải lúc nào ta cũng có thể dán được tấm phản quang lên trên vật cần đo.
Đếm PRM.
Arduino được sử dụng để đếm RPM và hiển thị nó trên màn hình LCD. Transistor hồng ngoại được kết nối với Ngắt 0 (chân số 2) của arduino. Ngắt arduino được cấu hình để kích hoạt cạnh lên. Kết quả là, biếm đếm ngắt sẽ cộng thêm 1 sau mỗi lần có ngắt xảy ra (điện áp tăng đột ngột). Thời gian trong chu kỳ đếm được xác định bằng hàm millis(). Hàm millis() có nhiệm vụ trả về một số - là thời gian (tính theo mili giây) kể từ lúc mạch Arduino bắt đầu chương trình. Nó sẽ tràn số và quay lại số 0 (sau đó tiếp tục tăng) sau 50 ngày. (Số lần ngắt / thời gian tính bằng mili giây) * 60000 sẽ cho ra số vòng quay mỗi phút (RPM) của động cơ.

Điều khiển tốc độ của động cơ.
Một bộ kiểm soát tốc độ động cơ cũng được tích hợp trong mạch. Transitor Q1 được sử dụng để điều khiển động cơ. Cơ sở của nó được kết nối với pin pwm 9 của arduino thông qua điện trở giới hạn hiện tại R1. Biến trở R4 được kết nối với chân anlog A0 của arduino. Điện áp ở chân này được chuyển đổi thành giá trị trong khoảng từ 0 đến 1023 bằng cách sử dụng chức năng anlogRead. Sau đó, giá trị này được chia cho bốn để phù hợp với phạm vi từ 0 đến 255. Sau đó, giá trị này được ghi vào chân PWM 9 bằng cách sử dụng chức năng anlogWrite. Kết quả sẽ là một sóng vuông ở chân 9 có chu kỳ làm tỷ lệ với giá trị được viết bằng hàm analogWrite. Ví dụ: nếu giá trị là 255, chu kỳ làm việc là 100% và nếu giá trị là 127, chu kỳ làm việc là 50%. D1 là một diode chống ngược và C1 là một tụ triệt tiêu điện áp vọt lố. Vòng quay và chu kỳ nhiệm vụ được hiển thị trên màn hình LCD bằng thư viện LiquidCstall. Chương trình Arduino thể hiện dưới đây.
Chương trình.
https://drive.google.com/file/d/1Gp3oI2cDCSP18RR2xkhyyjEjhxEGwKvy/view?usp=sharing
Ghi chú.
- Cấp nguồn cho bảng mạch bằng cách sử dụng nguồn 9V thông qua giắc cắm nguồn bên ngoài.
- Nguồn cho Arduino là 5V.
Quạt tôi sử dụng là 9V / 100mA. Transitor 2N2222 chỉ có thể xử lý tối đa 800mA. Hãy ghi nhớ điều này trong khi chọn tải.
Mô-đun LCD được sử dụng là JHD162A.
Biến trở R5 có thể được sử dụng để điều chỉnh độ tương phản của màn hình LCD. Khi được kết nối trước, LCD có thể không hiển thị bất cứ thứ gì. Điều chỉnh R5 cho đến khi bạn có được màn hình.
Bề mặt bên của transistor hồng ngoại cần phải được che bằng băng dính.


Hotline: 0979 466 469




