




bài viết mô tả các khía cạnh khác của giao diện một động cơ stepper với arduino
Interfacing Stepper Motor để Arduino
Arduino Stepper Motor Interfacing Sử dụng Darlington IC ULN2003A
Trong bài viết này, chúng tôi đang xuất bản một dự án giải thích các khía cạnh khác nhau của giao diện một Động cơ stepper với Arduino. Động cơ bước là một động cơ DC được thiết kế đặc biệt đi kèm với những lợi thế của cả động cơ servo và động cơ dc bình thường. So với một động cơ Dc bình thường, rpm tối đa một động cơ bước có thể sản xuất là rất thấp. Nhưng họ có lợi thế là họ có thể được định vị chính xác. Không giống như động cơ servo, động cơ bước cũng có thể được xoay liên tục. Trên cơ sở sự sắp xếp quanh co bên trong, động cơ bước có thể được phân loại thành đơn cực và lưỡng cực. Động cơ bước chúng tôi đang sử dụng ở đây là một động cơ bước đơn cực tên là 28BYJ-48. Sau khi đi qua dự án, bạn có thể chạy hoặc xoay động cơ theo hướng mong muốn.
Hãy bắt đầu hướng dẫn của chúng tôi và tìm hiểu làm thế nào để giao tiếp một động cơ bước để Arduino.
Mục tiêu của dự án
• Hiểu được công việc cơ bản của động cơ bước.
• Giao tiếp của động cơ bước với Arduino.
• Tạo mã để chuyển động cơ sang hướng mong muốn.
• Sử dụng một thư viện Arduino đơn giản cho giao diện động cơ bước.
Các thành phần được sử dụng
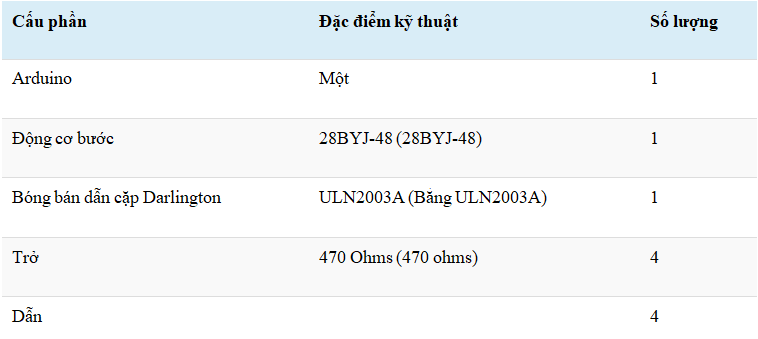
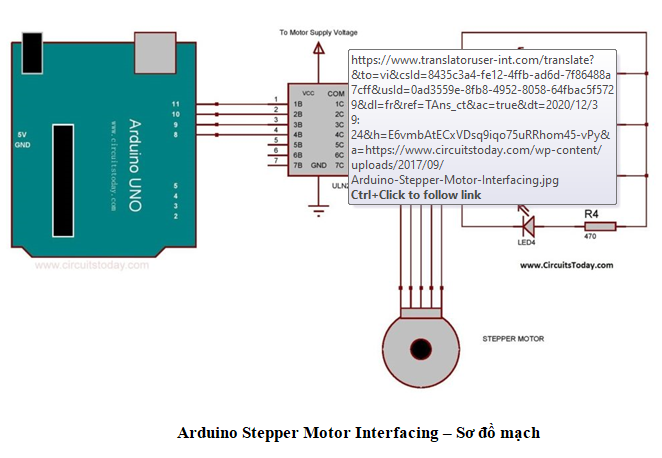

Lắp ráp các mạch như thể hiện trong sơ đồ. Các thành phần cần thiết và kết nối được giải thích dưới đây
Động cơ bước 28BYJ-48
Như đã đề cập trước đó động cơ bước được phân loại thành động cơ bước đơn cực và lưỡng cực theo sự sắp xếp quanh co của họ. 28BYJ-48 là một động cơ bước đơn cực với cả hai cuộn dây trung tâm khai thác và kết nối với pin chung của ULN2003A. Theo mạch còn lại bốn đầu của cuộn dây được kết nối với các chân đầu ra của một IC Darlington (ULN2003A). ULN2003 là một nguyên khối Darlington IC bao gồm bảy cặp bóng bán dẫn NPN Darlington với điện áp cao và khả năng hiện tại. Nó bao gồm các điốt kẹp cathode phổ biến cho mỗi cặp NPN Darlington, làm cho IC trình điều khiển này hữu ích cho việc chuyển đổi tải cảm ứng. Darlington IC được sử dụng ở đây như là trình điều khiển động cơ bước cho Arduino. Kể từ khi 28BYJ làm việc tại 5V, chúng tôi kết nối pin com của ULN2003A để pin 5V của Arduino.
Một động cơ Stepper có thể được vận hành ở chế độ nửa bước hoặc chế độ bước đầy đủ. Ở đây mã được viết để nó hoạt động ở chế độ bước đầy đủ. Tệp thư viện đính kèm với bài viết này bao gồm một điều khoản để chạy động cơ ở chế độ nửa bước. Trong khi làm việc ở chế độ nửa bước, góc bước của động cơ sẽ được giảm xuống một nửa góc ở chế độ đầy đủ. Trong chế độ bước đầy đủ hai cuộn dây được tiếp thêm sinh lực tại một thời điểm. Tốc độ quay của động cơ có thể được kiểm soát bằng cách thay đổi độ trễ được áp dụng trước khi tiếp thêm sinh lực cho hai cuộn dây tiếp theo. RPM tối đa mà 28BYJ-48 có thể tạo ra là 15 vòng/phút.
.
Chương trình/Mã
Tải về Arduino Stepper Motor – Chương trình
Tải xuống Thư viện cho Arduino Stepper Motor
Các khía cạnh quan trọng và chương trình con của chương trình được giải thích dưới đây.
Vào đầu chương trình, bốn bộ xử lý trước được định nghĩa đề cập đến các chân Arduino được sử dụng để giao tiếp. Tiếp theo là việc sử dụng hằng số trong chương trình. 3 hằng số đầu tiên là để áp dụng độ trễ ở giữa hai cuộn dây liên tiếp năng lượng. Hai hằng số boolean tiếp theo được sử dụng để xác định hướng. Tại chức năng "setup()", các chân Arduino được sử dụng được cấu hình như chân đầu ra. Một chức năng có tên là "motoInput()" được sử dụng để cung cấp năng lượng cuộn dây bằng cách cho '1' để cuộn dây được chỉ định đó là để được tràn đầy sinh lực và '0' để các cuộn dây còn lại mà không phải là để được tràn đầy sinh lực. Vì chúng tôi dự định chạy nó ở chế độ bước đầy đủ, chúng tôi sẽ tiếp thêm sinh lực cho hai cuộn dây cùng một lúc. Điều này có thể được nhìn thấy trong các chức năng có tên là "turnStepper()".
"turnStepper()" là một chức năng để xoay động cơ theo hướng mong muốn ở một góc cụ thể. Góc, hướng quay và rpm của động cơ có thể được đưa ra dưới dạng thông số. "runStepper()" có chức năng tương tự như "turnStepper()". Sự khác biệt duy nhất là nó được sử dụng để chạy động cơ một số vòng quay cụ thể theo hướng và vòng tua máy mong muốn.
Ví dụ về cách sử dụng các hàm này được viết trong hàm "loop()".
Một thư viện đơn giản cho động cơ bước đơn cực 28BYJ-48 cũng được đính kèm với bài viết này. Sử dụng thư viện sẽ làm cho chương trình của bạn có vẻ đơn giản hơn. Vài ví dụ cũng được bao gồm trong đó, mà sẽ hiển thị như thế nào để sử dụng nó đúng cách.


Code: 7204-076 Còn hàng
Hotline: 0979 466 469



